用于点焊检测的 Matrixeye™VI+
特点
加强点焊检测功能的超声波检测装置
配备 3D SAFT-PA(三维孔径合成和相控阵)功能,检测精度高
- 可检测出平时难以测出的气孔和虚焊状况。
缺陷检测速度提高,检查时间缩短
- 与我们的上代型号相比,改进了CPU 性能,将显示结果的时间缩短了 40%。
- 图像刷新速度比上代机型提高了 1.6 倍。
简单易懂的操作便利性
- 扭曲压痕的检查可以通过实时图像和倾斜指引功能的辅助下准确,轻松地检查。
- 检查位置指引功能可减少误检,错检情况。
简明可视的结果显示
- 结果数据库功能可以以易于理解的方式显示和管理检查结果。
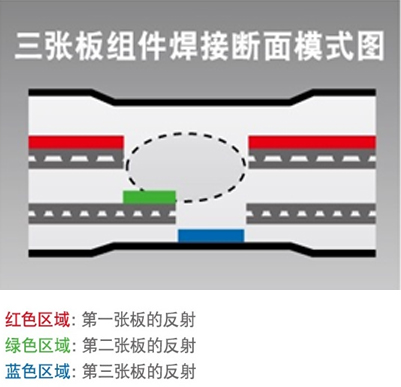
无论是2层或是3层板材的组合,从单侧即可完成自动判定检查。
使用手动开关可以实现单手检查操作。

专用点焊检测软件 Matrixeye™VI+.
实时化检查结果显示
现在,检查结果会在检查期间实时更新,从而更容易何时检查结果。
简单测量模式:
此模式允许您在不输入板厚信息的情况下测量焊接的直径。
改进的虚焊检测能力
该模式配备了检测虚焊状态的新算法,可以测量出实际的直径。
各种自动调整和检查功能的增强
除了传统的自动表面调整外,还搭载了灵敏度调整,楔块磨损检查功能和探头检查功能。 有助于保持稳定的检查效果。
改进的操作便利性
可见性和操作便利性得到了极大的提高,例如界面布局与以前的软件相比发生了显着变化,并且可以按类别设置显示,并且可以直观地选择指定的文件。
外部联动拓展功能
新配备与外部 PLC 或 PC 联动的拓展功能,现在可以从外部控制 Matrixeye™。
基本规格
| 项目 | 规格 ※ | 言论 | |
|---|---|---|---|
| 常规 | 设备尺寸 | 345 × 230.5 × 125 毫米 | 综合投影部分 |
| 装置重量 | 约 5.5 kg(约 6.5 kg) | 1 节电池(2 节) | |
| 中央处理器 | 英特尔凌动 x6211E | ||
| 记忆 | 8GB | ||
| 存储 | SATA 固态硬盘 512GB | ||
| 这 | Windows10 IoT 企业版(64 位) | ||
| 表示 | 10.4 英寸 (XGA) LCD 触摸屏 | ||
| USB接口 | 2.0 × 2,3.0 × 2 | ||
| 视频输出 | HDMI 接口 | ||
| 以太网 | 1000BASE-T | ||
| 编码器 | TTL 等效输入:6位 | ||
| 权力 | 电池 | 锂离子电池 | 94Wh |
| 电池寿命 | 3 小时 / 6 小时 | 1 节电池 / 2 节电池 | |
| 交流 | 100~240V 50/60 赫兹 | ||
| 使用环境 | 温度 | 5~35 摄氏度 | |
| 湿度 | 相对湿度 20~80% | 无冷凝 | |
| 成像 | 图像合成过程 | SAFT(孔径合成)处理 | |
| 附属品 | 鼠标,键盘,2 节电池,加长电池盒 电池充电器,交流适配器(用于主机,充电器), 电源线(主机用,充电器用),耦合剂 |
||
* 此规格如有更改,恕不另行通知。
基本功能
| 项目 | 规范 | 备注 |
|---|---|---|
| 支持的板材数量 | 2 层板组,3 层板组 | 检测对象超出上述的可检测范围,也存在可以检测的可能性,具体请联系我们。 |
| 可检测板厚 | 最小厚度:约 0.5 毫米 | |
| 最大总厚度:约 6.0 毫米 | ||
| 可检测材质 | 钢(包括高强度钢),铝 | |
| 可检测焊接直径 | 约 3mm~8mm | |
| 检测和判断项目 | 焊接直径,焊接面积,压痕深度,焊接厚度,虚焊 | 具备n√tmin 的阈值设置功能 |
* 此规格如有更改,恕不另行通知。
其他功能
| 项目 | 特征 |
|---|---|
| 检查条件创建和管理功能 | 具备各个检测点的不同检测参数的作为单个检测程序的创建和管理功能。 |
| 表面调整功能 | 识别产品的表面(原点)并自动调整。 |
| 通过在工作前执行,可以最大限度地减少检测误差。 | |
| 耦合检查功能 | 检测楔块和被测产品表面之间是否已涂敷耦合剂,若涂敷量不足,则亮起提示灯。 |
| 对准辅助功能 | 确认焊点表面与楔块的平行度的功能。平行度稳定时可提高检测精度。 |
| 数据管理功能 | 检查结果可以按项目,如合格/不合格,测试日期,检查员等进行排序,数据管理便捷化。 |
* 此规格如有更改,恕不另行通知。
检测例
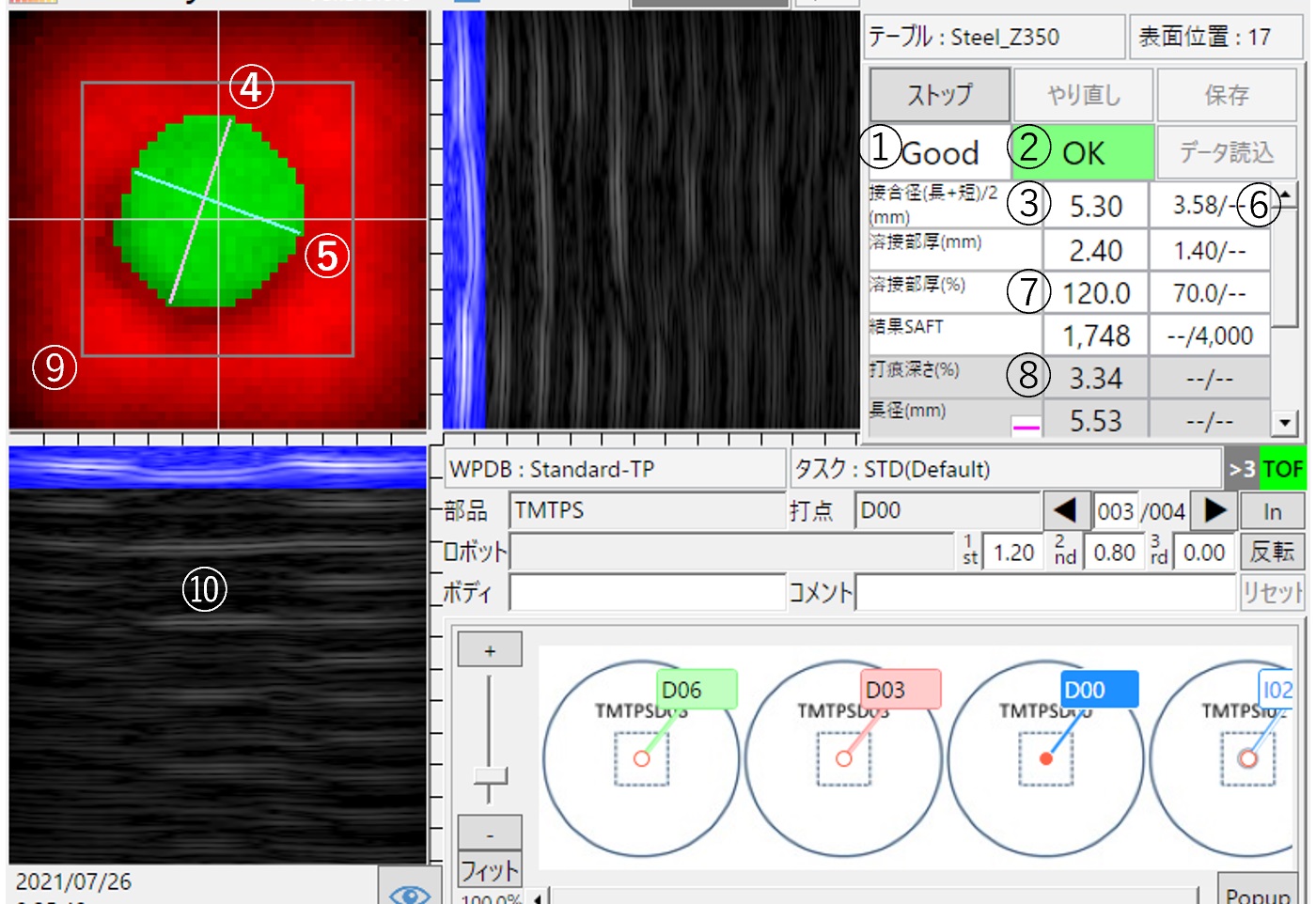
- ①:自动检测结果:
(Good, Small, Open,烧穿,虚焊) - ②:自动判断结果:(OK,NG, N.A.)
- ③:平均节理直径:(④+⑤)/2
- ④:接合长径:红线
- ⑤:接合短径:蓝色
- ⑥:接合径阈值:nt(t=最薄板厚)
- ⑦:焊接厚度
- ⑧:压痕深度
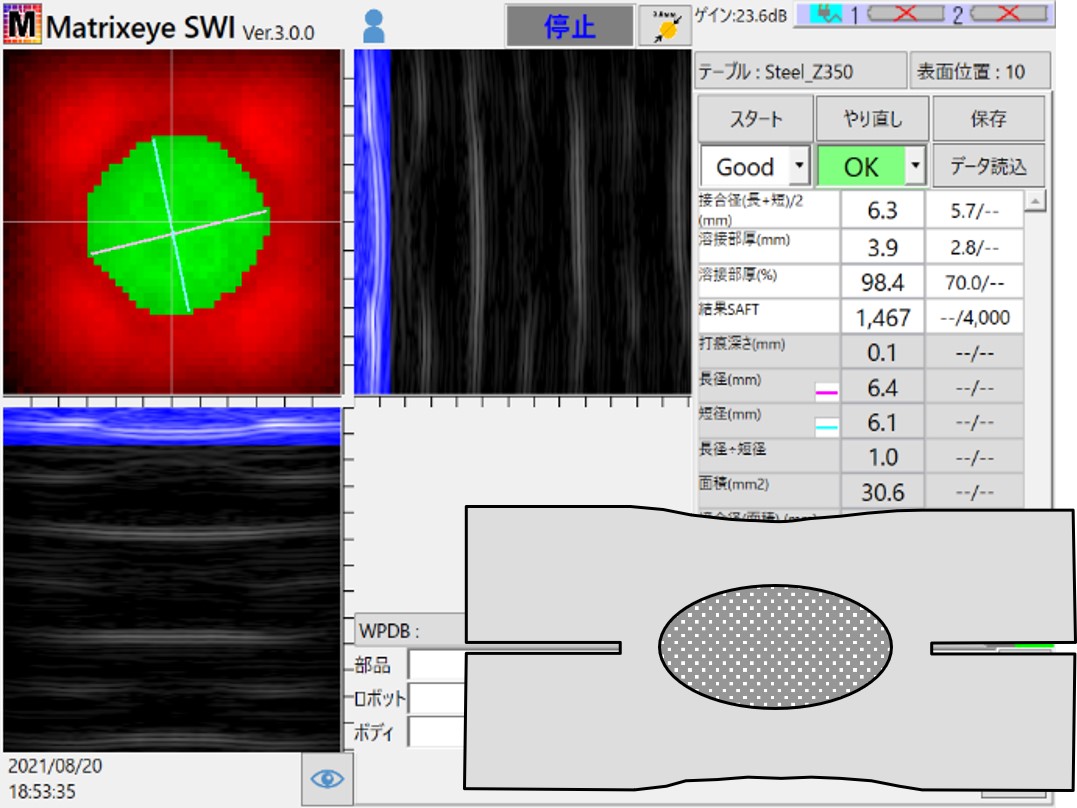
Good(Two)(焊接完好)
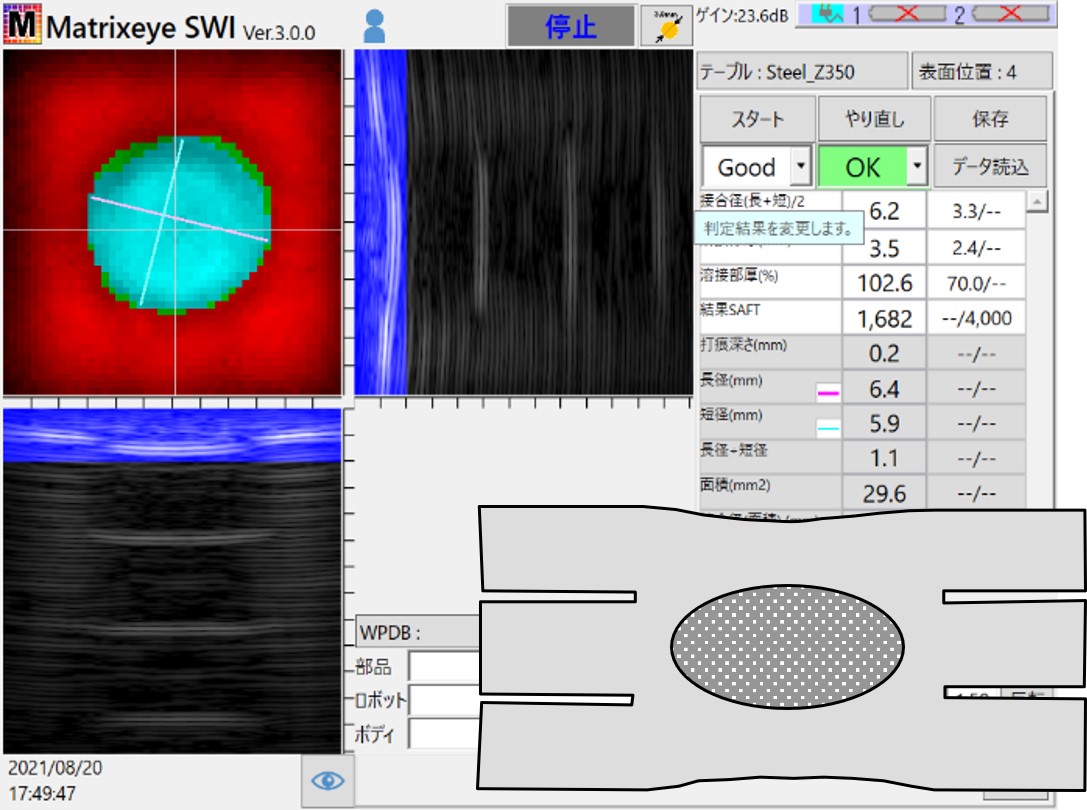
Good(Three plates)(焊接完好)
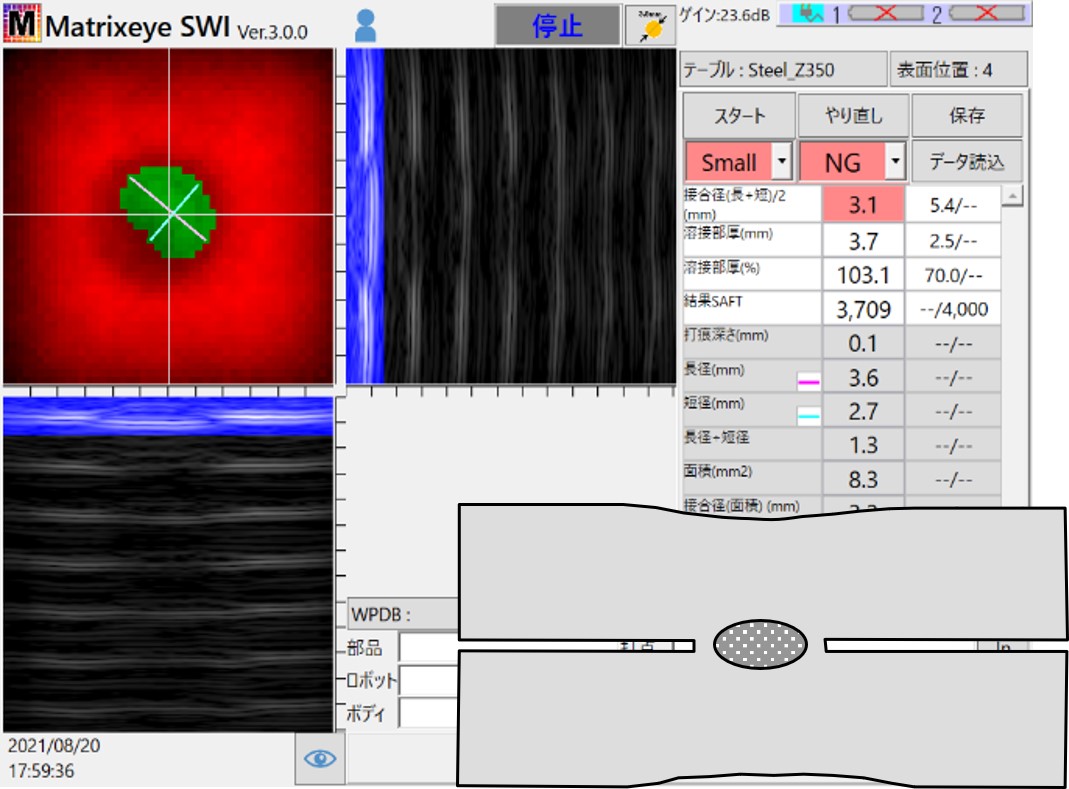
small(焊核过小)
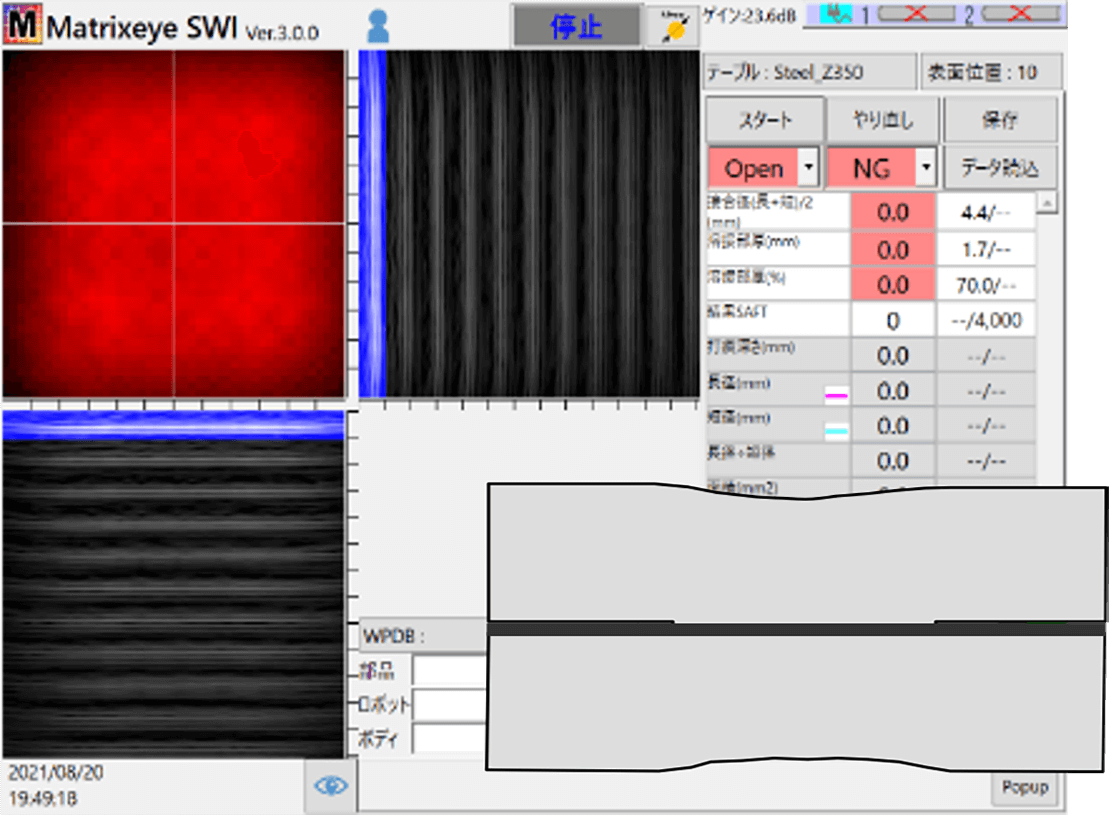
open(未焊接)
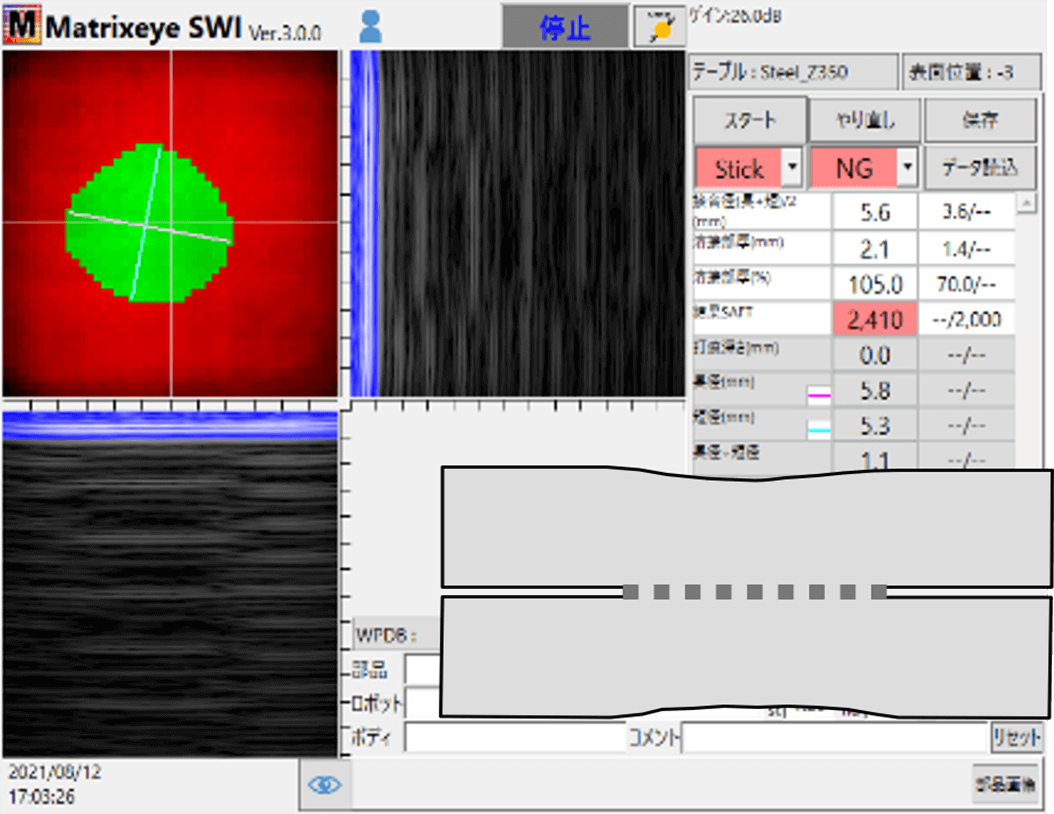
Press welding condition
- Matrixeye™是东芝能源系统和解决方案公司的注册商标。
- Microsoft, Windows, Excel是微软公司在美国或在其他国家登录的商标。